Carte PCA9685
Cette carte permet de piloter 16 servos moteurs grâce au bus I2C.
Etapes préliminaires : Configuration
Ces étapes sont décrites largement dans le chapitre relatif au bus I2C.
Activer le bus I2C
sudo raspi-config
puis Advanced options
Choisir A7 I2C et répondre <Oui>
Accepter et choisir le chargement par défaut
sudo reboot
Installer la bibliothèque de gestion du protocole I2C
- sudo apt-get install libi2c-dev
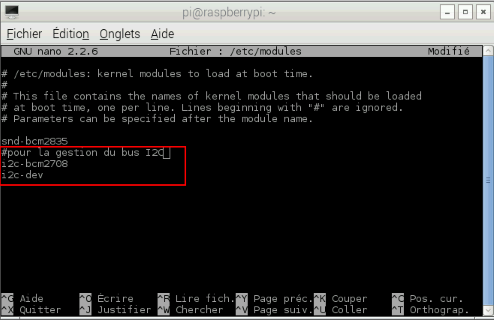
- Editer le fichier de configuration des modules et ajouter les lignes suivantes
- Sauver par ctrl-X puis valider par O (pour oui)
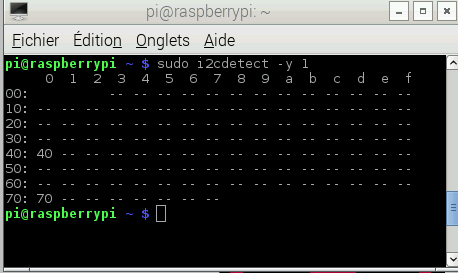
- Vérifier l'activation du protocole i2c par
- Autoriser l'utilisateur pi à utiliser l'i2c
- stparam=i2c1=on
- dtparam=i2c_arm=on
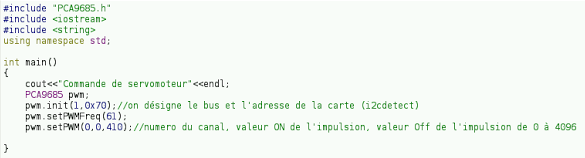
- init : permet de définir l'adresse de la carte de pilotage des servomoteurs. Ces données s'obtiennent par la commande i2cdetect. Le premier attribut est le numéro de bus I2C et le deuxième est son adresse.
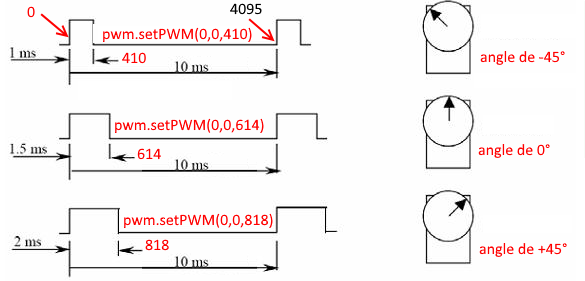
- setPWMFreq : cette instruction permet de définir la fréquence de fonctionnement du servomoteur. Une valeur de 100 permet d'obtenir des impulsions de 10ms.
- setPWM : cette instruction utilise trois attributs :
- le numéro du servomoteur de 0 à 15
- le moment de passage à 1 de l'impulsion (entre 0 et 4095)
- le moment de passage à 0 de l'impulsion (entre 0 et 4095)
sudo nano /etc/modules
sudo i2cdetect -y 1
sudo adduser pi i2c
Editer le fichier de configuration
sudo nano /boot/config.txt
et ajouter si besoin ces deux lignes dans ce fichier :
Ces deux dernières opérations autorisent l'usage du bus I2C par l'utilisateur PI
Piloter des servomoteurs avec QT
Il est nécessaire de disposer de l'excellente bibliothèque de Georgi Todorov : PCA9685
Les fichiers PCA9685.h et PCA9685.cpp doivent être dans le dossier du projet.
Il doivent également être ajoutés au projet
Programme d'exemple :
Exemple de valeurs :